2025年,一场对于自动驾驶感知旅途的热烈争论在汽车行业陡然升温。短短数日,被和会为“查缺补漏”的小米YU7官宣全系标配激光雷达、4D毫米波雷达;另一边,小鹏汽车董事长何小鹏却再度为纯视觉决议振臂高呼,并给出明确时间表:“最晚约一年半以后,或者2027年头,纯视觉决议将成为行业共鸣。”更引东谈主详实的是开云kaiyun官方网站,小鹏行将推出的G7纯电SUV,据传将聘用纯视觉组合辅助驾驶决议。

小鹏MONA M03 Max;图片开始:小鹏汽车
一场对于多传感器交融与纯视觉决议的争论在2025年再次参加尖锐化。
激光雷达看得遥望得清是个伪命题?
组合辅助驾驶本事在本年的商议峰值,莫过于3月29日深夜发生的那期事故捏续发酵。尽管阻挡刻下无论是官方如故小米汽车齐未尝公布更多细节,但对于事故的发生,互联网上掀翻了汹涌的公论波澜。
公众的质疑声雄起雌伏:有东谈主追问车辆安全设想颓势——“为何碰撞后会发生如斯剧烈的爆燃?”“车门是否因变形而无法开启,导致营救但愿插手?”;也有东谈主将锋芒指向驾驶员的操作。但最中枢的质疑耐久围绕着一个问题:小米SU7发布会上声称的“全系标配智能辅助驾驶”“高速NOA上市即请托”,尤其是在高速领航(NOA)所具备的功能之一就是“施工逃匿”,为安在要道时刻未能幸免悲催的发生?
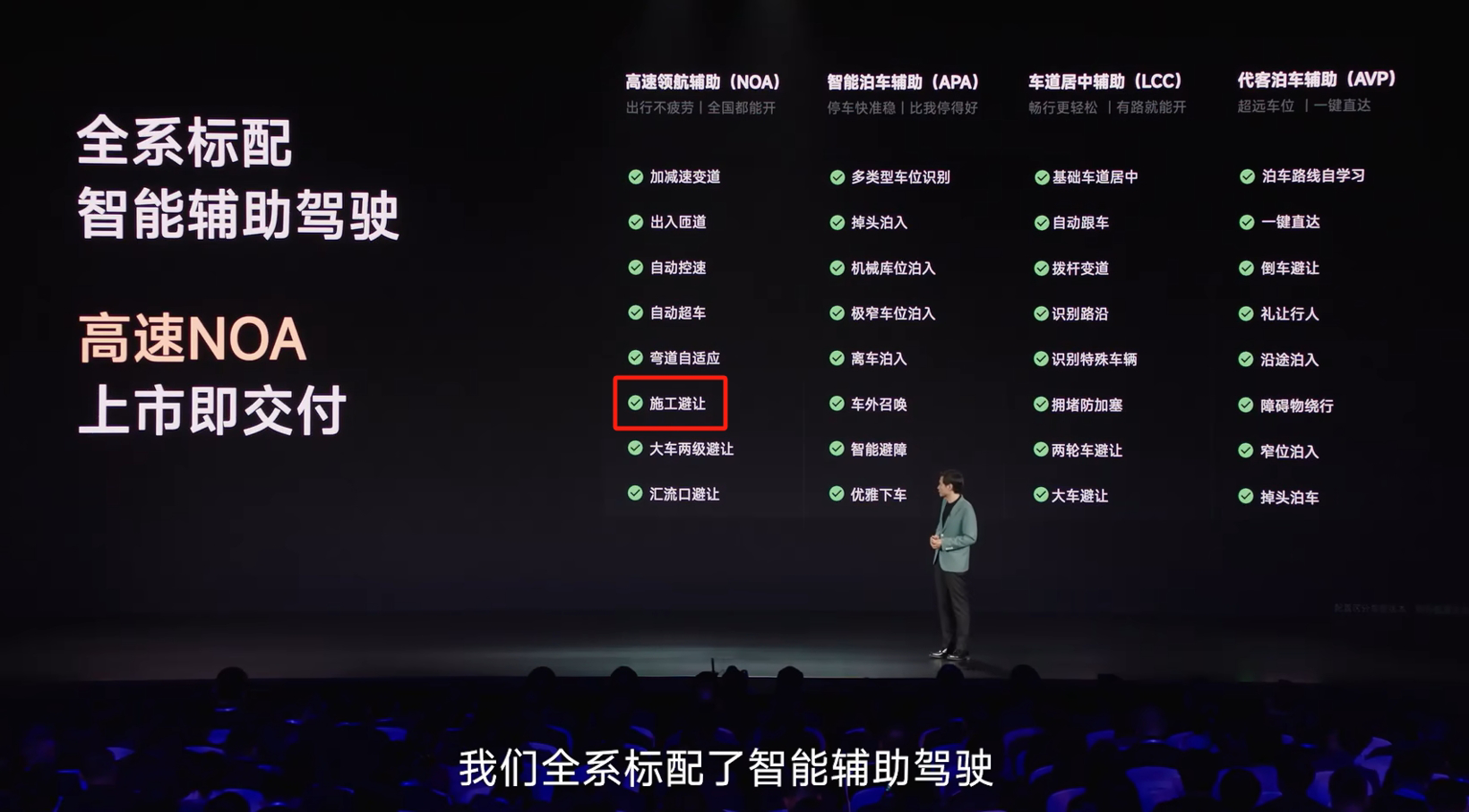
图片开始:小米SU7上市发布会直播截图
濒临捏续发酵的舆情,小米官方在事件曝光后分两次作出了致密回应,但似乎并未平息群众激越心计。
尤其是在查阅小米SU7的居品贵寓后发现,小米汽车智驾系统分为Xiaomi Pilot Pro和Xiaomi Pilot Max两版智能驾驶系统。事故车辆搭载就是Xiaomi Pilot Pro系统,该系统并未配备激光雷达这一要道硬件。这一事实曝光后,在有关事故商议中运转出现“莫得激光雷达的顺序版算不上真确的‘智驾’”等不雅点。
对此,一位从事激光雷达有关本事鸿沟众人向盖世汽车先容,纯视觉决议在录像头“看不见”或“看不清”的情况下存在局限性,如强光照耀、夜晚弱光环境、长进物体与配景面目疏导导致无法永诀等情况,照实存在禁绝物识别不够实时、到位的问题。这恰是业内大齐将激光雷达视为纯视觉决议必备安全冗余件的伏击原因——它能在视觉系统失效时提供要道的补充感知智商。
但这场本事门道之争在5月迎来戏剧性转化。小鹏汽车自动驾驶居品高等总监袁婷婷公开挑战行业共鸣,直言“激光雷达看得远是个伪命题”。这场本事论争从三个维度张开:
能量衰减与点云密度瓶颈:激光雷达依赖放射近红外光并筹商反射回波时间(ToF)来定位禁绝物,但这一旨趣导致其能量密度随距离呈普通反比衰减。以行业最初的192线激光雷达为例,在200米外探伤时,其回波信号强度和点云密度仅为近距离探伤的千分之一,导致对轻质物体(如塑料袋)与危急缠绵(如横穿电瓶车)的永诀智商大幅下跌。比拟之下,800万像素录像头在疏导距离下仍能捕捉到丰富的纹理、面目等语义信息,为算法决策提供更可靠的依据。
多径效应与低帧率加重误判风险:激光雷达在复杂场景中易发生屡次反射,导致回波信号混叠。举例,城市立交桥结构曾激发某车型将桥墩暗影误判为静止车辆,导致十余次非必要急刹。此外,主流激光雷达的10Hz刷新率仅为录像头帧率的五分之一,在120公里/小时车速下,200米外的移动缠绵物会在两次扫描隔断中位移超3米,进一步裁汰动态缠绵识别精度。
极点天气下的“致盲”逆境:激光雷达对雨雾等天气高度明锐。实测数据自大,暴雨环境下其有用探伤距离骤降至30米以内,且近场噪点加多五倍。而毫米波雷达凭借其长波长特质,在穿透智商上展现出特有上风。本年广东汛期路测中,纯视觉决议车辆在能见度50米工况下的识别准确率反而比交融感知决议跳动12%,突显了单一激光雷达决议的局限性。
争议在5月28日达到沸点。微博认证为“小鹏汽车品牌公关负责东谈主”的账号“XP-阿莱克氏Alex”甚而径直发布了一条极具争议的微博,直指”全球新能源汽车还是致密参加中场,“大算力+大模子”材干真确界说一台AI汽车的智能智商上限。不要过于痴迷单一某个传感器……”其用词间颇具调侃意味的嘲讽,激发业内深度探讨。
纯视觉决议,为高阶智驾卸遭殃?
耐久以来,全球智能驾驶鸿沟呈现赫然的本事分野:特斯拉凭借其FSD纯视觉决议构建起本事护城河,而国内市集则由极越汽车等少数派信守视觉感知阵脚,与主流激光雷达门道变成赫然对比。
特斯拉掌门东谈主埃隆·马斯克曾屡次在本事论争中袭击激光雷达,其高尚资本与有限性能无法匹配自动驾驶的终极需求。相较之下,特斯拉构建的以8颗录像头为中枢的BEV+Transformer感知架构,伙同Dojo超算中心的算法迭代,已变成数据驱动的闭环体系。这种本事旅途弃取在国内市集碰到耐久争议——小鹏、蔚来等头部玩家此前均将激光雷达行为高阶智驾的标配,广汽、长安等传统车企更将多传感器交融决议视为安全冗余的中枢保险。
不外这一趋势却在2024发生了回转。
盖世汽车商量院统计的信息自大,行业正迎来纯视觉决议的聚集爆发期:华为ADS SE基础版已收场多车型搭载,大疆车载计谋升级后的卓驭科技凭成行平台切入主流市集,蔚来乐谈品牌更是推出全系视觉决议居品矩阵。非凡值多礼贴的是,小鹏汽车完成本事门道紧要转向——在P7+车型上率先落地去激光雷达的AI鹰眼视觉决议,记号着昔日激光雷达最顽强的扶助者致密"倒戈"。
刻下,华为的纯视觉智驾决议ADS SE基础版,还是率先在新款问界M7 PRO、深蓝L07上搭载,后续还将在深蓝S07、智界S7 PRO等车型上无间搭载。蔚来乐谈的纯视觉门道也还是运用在乐谈L60上,卓驭的成行平台上则是“走下来”了宝骏云朵和宝骏云海等车型,其中宝骏云海还是初步具备端到端功能。
行为智驾第一梯队的小鹏汽车,自2021年推出搭载激光雷达的P5车型后,而后推出的高配版车型基本齐有搭载激光雷达。不外,客岁小鹏汽车却首当其冲的烧毁了激光雷达,推出了不带激光雷达的高阶智驾车型小鹏P7+。
小鹏汽车董事长何小鹏示意:“端到端大模子上车之后,系统通过录像头取得的视频信息显赫加多了。” 而当今低精度的激光雷达,后果远远比不上高精度的录像头。
小鹏车端大模子2025年缠绵收场百公里摄取1次,奋勉在18个月内收场类L3+智驾体验。何小鹏觉得,这通过视觉决议就能收场。
除了小鹏汽车外,像蔚来的乐谈品牌、上汽通用五菱的宝骏品牌等也齐纷纷拥抱纯视觉决议。在盖世汽车商量院看来,究其原因,大模子+端到端算法本事的捏续转变是中枢驱能源,此外,越来越“卷”的市集近况,也在倒逼群众不得不弃取资本更低的智驾决议。
盖世汽车商量院指出,纯视觉决议的中枢上风是传感器依赖度低,较之重激光雷达+毫米波雷达的决议,举座资本低好多,以更好的性价比收场智驾功能。但纯视觉决议的劣势其实也不小,这套决议严重依赖算法的捏续迭代和海量高质料数据的捏续驱动,同期对超算中默算力和基础法子的条件也绝顶高,这些齐是不菲的隐变资本。
不外,激光雷达的“失宠”并非仅因价钱单孤独分。本事的锻练度、供应链的踏实性、以及与现存智能驾驶系统的兼容性等问题,相通影响了车企的弃取。
跟着端到端决议的研发深远,纯视觉决议在特定场景下的发挥,如识别禁绝物、和会交通环境等方面,也在一定进度上解说了其可行性,这也使得越来越多的车企运转再行评估激光雷达的必要性。
辅助驾驶决议,不该非此即彼
在提倡“激光雷达看得远是个伪命题”不雅点的同期,袁婷婷进一步阐释,小鹏汽车向纯视觉感知架构的演进绝非本事倒退,而是基于数据闭环构建与算法范式冲突的势必弃取,其本事决策逻辑折射出自动驾驶产业正在资格的深层变革。
在感知精度层面,袁婷婷以推行场景数据论证:配备800万像素录像头的视觉系统在200米距离仍可保捏0.1°角分辨率,能明晰辨识塑料袋与电瓶车的纹理特征相反。相较之下,激光雷达受限于扫描线束密度,同等距离下点云寥落度导致缠绵物详细复兴智商存在数目级差距。
算法架构层面,小鹏汽车通过端到端大模子收场本事冲突。其AI鹰眼视觉决议已开脱传统多传感器交融框架,通过4D标注数据覆按变成场景和会智商。袁婷婷强调,模子对多模态数据的交融处理效用,远比单一传感器性能参数更具决定性作用。
交易化落场所面,本事门道弃取流泄漏显赫资本相反。单颗激光雷达约占整车物料资本(BOM)的2%,而8录像头视觉决议硬件资本可裁汰37%。更要道的是,取消激光雷达使整车减重8公斤,续航里程晋升5.2%,这种工程化均衡径直滚动为滥用者可感知的居品力。
尽管袁婷婷的质疑直指激光雷达痛点,但行业对传感器交融的共鸣并未动摇。激光雷达在夜间探伤、低矮禁绝物识别(如井盖、石块)及异形缠绵检测(如马车)中的上风仍不能替代。举例,Waymo测试自大,激光雷达在识别异形禁绝物时比纯视觉决议快0.3秒,显赫裁汰城市谈路误刹车率.
业内众人指出,自动驾驶的终极决议并非“非此即彼”,而是需要构建“录像头为主、多传感器冗余”的感知体系。举例,毫米波雷达可弥补激光雷达在雨雾天气的短板,而录像头则负责提供语义信息。这种“主次分明、上风互补”的交融策略,才是本事演进的正确看法。
本事门道博弈的深层影响已浸透至滥用端知道。还牢记本年爽气假期,就在小米SU7高速事件畴昔数日后,多地高速搞定部门将安全领导从“老成雨天路滑”蜕变为“慎用智驾”拔旗易帜。更有甚者,从“请勿过于依赖辅助驾驶”,到“慎用辅助驾驶”,再到“勿用辅助驾驶”,安徽高速三改智驾口号。这种用户信任危机倒逼行业再行凝视本事宣传界限。
八成,正奈何小鹏所臆想,2027年纯视觉会在中低端市集变成主流;耐久看开云kaiyun官方网站,“交融感知”与“纯视觉”将分食不同场景——后者代表效用与进化,前者代表极致与可靠。但这场本事门道之争的本体,是工程化落地与交易化均衡的终极博弈,而最终裁决者终将是费钱包投票的滥用者。